
Giovanni Rodríguez Rojas1, Alejandra Mora Vega1, David Santiago Tirado Cruz1, María Juliana Sánchez Rodríguez1, Mariana Garay Álvarez1, Erwin Hernando Hernández Rincón2
 ORCID
ORCIDRecibido: 13-04-2025
Aceptado: 21-05-2025
©2026 El(los) Autor(es) – Esta publicación es Órgano oficial de la Sociedad de Anestesiología de Chile
Revista Chilena de Anestesia Vol. 55 Núm. 1 pp. 45-56|https://doi.org/10.25237/revchilanestv55n1-07
PDF|ePub|RIS
Innovations in robotic systems for endotracheal intubation for the future of advanced airway management: A scoping review
Abstract
Endotracheal intubation continues to represent a challenge in emergency settings due to variability in the experience of medical personnel. In response, technological advances have emerged aiming to optimize airway management through the use of robotic systems. This study synthesizes the available evidence on such systems, following a scoping review conducted in databases such as PUBMED, SCOPUS, and BIREME. Fourteen experimental studies published between 2014 and 2024 described ten systems with different technological approaches, including soft actuators, teleoperation, and artificial intelligence. The results show an improvement in intubation times and success rates in simulation models. Although these systems promise to transform prehospital and anesthetic care, they still face technical and ethical challenges that must be resolved before widespread clinical adoption.
Resumen
La intubación endotraqueal continúa representando un reto en entornos de emergencia debido a la variabilidad en la experiencia del personal médico. En respuesta, han surgido avances tecnológicos que buscan optimizar el manejo de la vía aérea mediante el uso de sistemas robóticos. Este estudio sintetiza la evidencia disponible sobre dichos sistemas, tras una revisión exploratoria realizada en bases de datos como PUBMED, SCOPUS y BIREME. Se incluyeron 14 estudios experimentales publicados entre 2014 y 2024, que describen 10 sistemas con distintos enfoques tecnológicos, incluyendo actuadores blandos, teleoperación e inteligencia artificial. Los resultados muestran una mejora en los tiempos de intubación y en las tasas de éxito en modelos de simulación. Aunque estos sistemas prometen transformar la atención prehospitalaria y anestésica, aún enfrentan retos técnicos y éticos que deben resolverse antes de su adopción clínica generalizada.
-
Introducción
La intubación endotraqueal es un procedimiento comúnmente realizado en departamentos de emergencia y salas de operaciones a nivel mundial. Se considera el estándar de oro para asegurar la vía aérea en pacientes que necesitan asistencia respiratoria y es una habilidad básica para los médicos. El enfoque más utilizado para la intubación se realiza mediante la inserción de un tubo endotraqueal mediante laringoscopia directa, elevando la mandíbula con un laringoscopio y proporcionando una vista directa de la glotis. Este procedimiento es crucial en pacientes en estado crítico como aquellos que cursan con dificultad respiratoria, ya que permite que una fuente externa asuma la función respiratoria, garantizando el intercambio gaseoso y la permeabilidad de las vías respiratorias del paciente[1],[2],[3].
La intubación endotraqueal es un procedimiento crítico que requiere un alto nivel de habilidad, ya que la falla respiratoria no tratada puede llevar a daño cerebral y muerte en minutos. Además, a menudo presenta dificultades en pacientes con cuellos cortos, espinas artríticas o vías respiratorias inflamadas, y su éxito depende de la experiencia y destrezas del médico[2],[3]. Se estima que alrededor del 12,7% de las intubaciones de urgencia fallan en el primer intento, con tasas de éxito de solo el 70% y el 89% en el segundo intento. Este fracaso inicial se asocia con una mayor probabilidad de eventos adversos, además de estancias hospitalarias más prolongadas y costos mayores[4]. Para mejorar los resultados, se han desarrollado alternativas, como el uso de video-laringoscopios o endoscopios flexibles, que facilitan la visualización de la glotis y pueden servir como herramientas de rescate en vías aéreas difíciles[5]. Sin embargo, la visualización de la glotis no garantiza siempre una colocación exitosa del tubo endotraqueal[6].
Con el avance progresivo de la ciencia robótica, los robots están jugando un papel cada vez más crucial en el ámbito médico[3]. El sistema robótico es el equipo avanzado más complejo en medicina, integrando la mecánica, la biomecánica, la electrónica y la informática[7]. La intubación traqueal asistida por estos dispositivos representa un futuro método alternativo para asistir en la colocación precisa de un tubo endotraqueal en la vía aérea[3]. Sin embargo, aunque se han propuesto diseños para la navegación en las vías respiratorias humanas, la implementación de endoscopios robóticos para la colocación de tubos endotraqueales sigue siendo un área de investigación. En este contexto, la asistencia robótica podría ofrecer una guía activa para dirigir el tubo hacia la entrada de la glotis, mediante la detección de características anatómicas de la vía aérea superior del paciente[5].
La intubación endotraqueal asistida por robots representa un avance significativo hacia un manejo más eficiente de la vía aérea, al reducir la dependencia de la experiencia del médico y superar las deficiencias debidas a la falta de personal capacitado. Asimismo, promete mejorar la precisión de la intubación, garantizando la seguridad del paciente y mejorando la capacidad para abordar casos clínicos desafiantes, potenciando incluso el desempeño de médicos experimentados[3],[5]. Además, podría optimizarse el tiempo previo a la visualización de la glotis, siendo este el paso más desafiante durante la intubación, conllevando a un cambio potencial en el modelo actual de rescate, ante la posibilidad de intubación asistida por robot a distancia, permitiendo la realización de procedimientos remotos[2],[8].
Centrándonos en las zonas rurales donde la falta de personal médico capacitado es un desafío recurrente, este tipo de tecnología podría garantizar un acceso más seguro a procedimientos avanzados, disminuyendo la dependencia de la experiencia individual y mejorando los desenlaces clínicos en los pacientes. En las unidades de urgencias, su implementación no solo optimizaría el tiempo de respuesta en casos de alta complejidad, sino que también reduciría errores humanos, potenciando la efectividad durante la intubación[3],[5]. Además, la posibilidad de realizar intubaciones asistidas por robots de forma remota podría transformar los modelos actuales de atención prehospitalaria, permitiendo la intervención inmediata en escenarios de difícil acceso[8], como aquellos afectados por desastres naturales o violencia armada. Esta innovación, por lo tanto, representa una solución prometedora para superar las limitaciones del sistema de salud y garantizar una atención más integral. Por último, este artículo tiene como objetivo sintetizar la evidencia disponible sobre el uso de sistemas robóticos asistidos en la intubación y manejo avanzado de la vía aérea.
-
Métodos
Se realizó una revisión sistemática exploratoria para sintetizar la evidencia disponible sobre el uso de sistemas robóticos asistidos en la intubación y el manejo de la vía aérea. Se usó la extensión de la declaración PRISMA para presentar resultados en revisiones sistemáticas exploratorias (PRISMA-ScR), PRISMA[9] (Preferred Reporting Items for Systematic Reviews and Meta-Analysis) Figura 1, y los pasos propuestos por Arksey y O’Malley[10] revisados por Levac[11]. Esta metodología se basa en el siguiente orden: a) Identificar la pregunta de investigación; b) buscar publicaciones relevantes; c) selección de estudios; d) resumir y reportar los resultados. Se respondió a la pregunta de investigación: ¿Cuál es la evidencia actual sobre la eficacia de los sistemas de intubación asistidos por robot en la intubación endotraqueal de pacientes que requieren manejo avanzado de la vía aérea?
-
Criterios de elegibilidad y proceso de selección
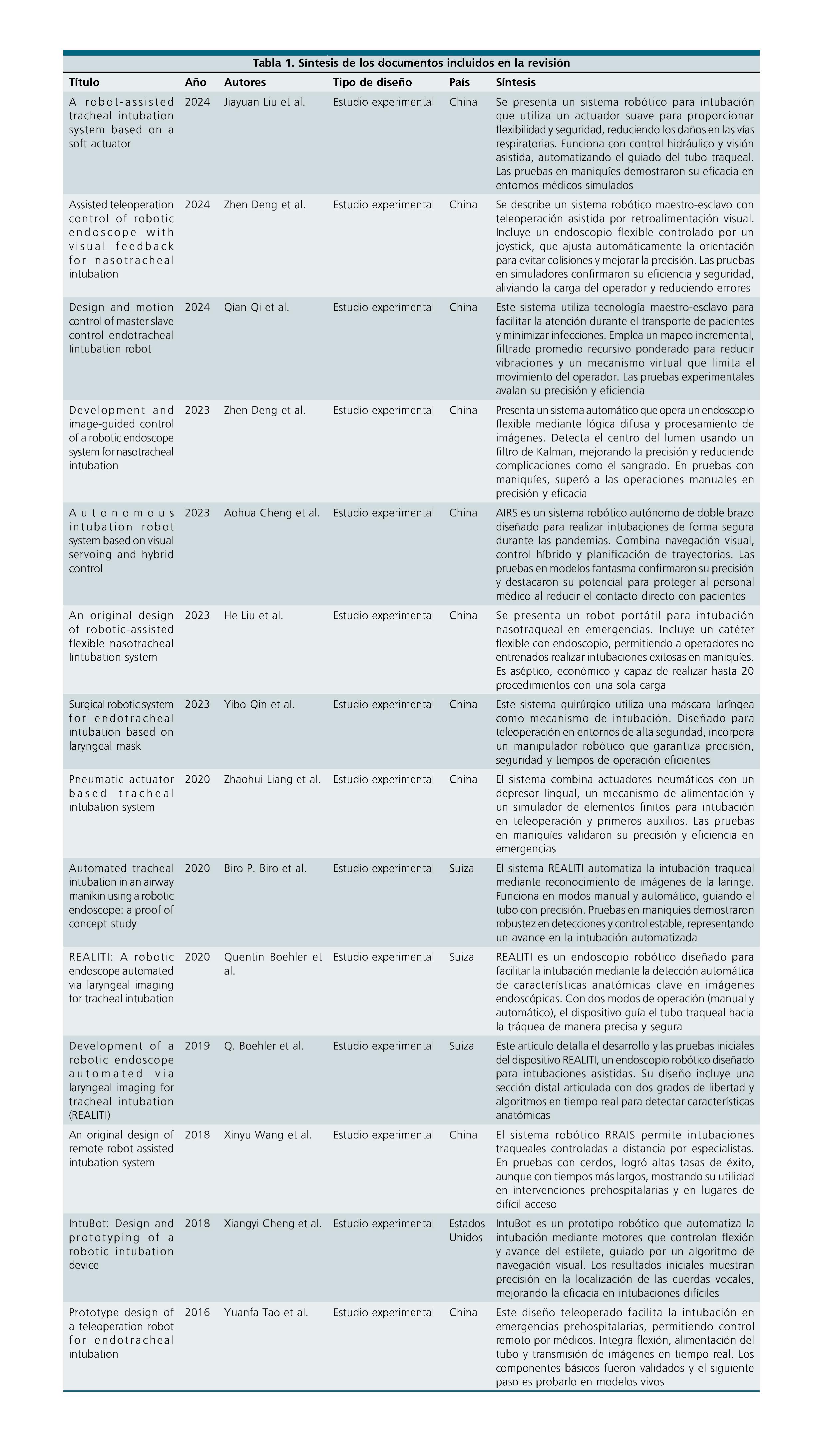
La búsqueda incluyó artículos publicados entre los años 2014 a 2024, redactados en el idioma inglés y español. Se utilizaron las siguientes bases de datos para la búsqueda: PubMed, Scopus, y BIREME, utilizando los siguientes términos MeSH: “Robot Assisted”, “Endotracheal Intubation”, “Airway Management”, en combinación con: “Robotic endoscope”, “Robotic intubation” y “Automated intubation” (Tabla 1). Además, se utilizó la metodología Snowball como método adicional de reclutamiento y búsqueda de literatura en gris en IEEE Xplore debido a su enfoque en ingeniería biomédica.
Se incluyeron estudios experimentales y observacionales analíticos sin restricciones respecto a las características de los pacientes, que abordaran específicamente procedimientos asistidos por dispositivos robóticos para intubación orotraqueal y nasotraqueal. Se excluyeron estudios teóricos como revisiones narrativas, así como editoriales y cartas al editor, con el fin de sintetizar los resultados y realizar un análisis cuantitativo con datos empíricos originales.
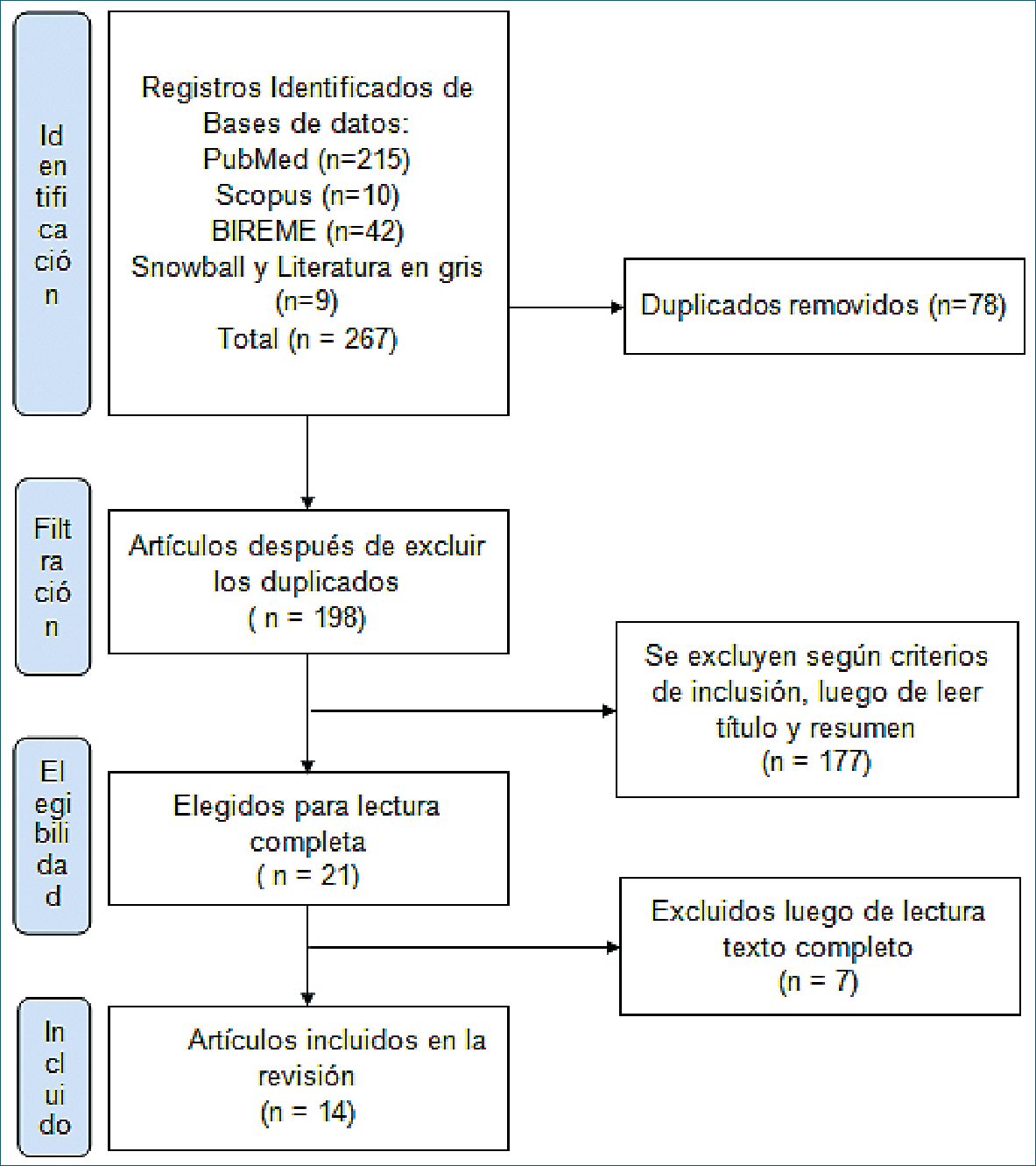
Figura 1. PRISMA Diagrama de flujo: Identificación de nuevos estudios a través de bases de datos y registros.
-
Extracción, recolección y síntesis de datos
Para el manejo de posibles sesgos se adoptaron medidas selectivas en la exclusión y análisis de los estudios incluidos. La revisión de los resúmenes y artículos completos fue realizada por tres investigadores de manera independiente. Las discrepancias se resolvieron mediante discusión en consenso entre los revisores y, cuando fue necesario, se pidió la intervención de un cuarto revisor. Se evaluaron los textos completos cuando fue necesario. Posteriormente, los datos específicos de cada estudio y la información relevante, se extrajo en una tabla de síntesis narrativa que incluyó autor, título, país, año, diseño de estudio, la cual se utilizó para abordar los objetivos de la investigación (Tabla 2). Adicionalmente, se realizó una categorización con base en la tecnología utilizada en cada sistema (Tabla 3). Por otra parte, con el fin de asegurar la calidad de las publicaciones seleccionadas, se analizó y discutió en consenso la veracidad de la información extraída.
-
Resultados
La búsqueda inicial entregó 276 resultados. Tras eliminar duplicados, se revisaron 198 estudios leyendo títulos y resúmenes. Según los criterios de inclusión se eliminaron 177 artículos, quedando 21 artículos para lectura completa. Se eliminaron aquellos que no estuvieran centrados en el ámbito de la intubación endotraqueal, con lo cual esta revisión incluyó 14 artículos.
El flujograma de los artículos fue reportado según la declaración PRISMA- ScR y se puede ver en la Figura 1.
-
Características de las fuentes de evidencia
En cuanto a las características metodológicas (Tabla 1), todos los estudios incluidos fueron experimentales (n = 14, 100%). En relación con el país, el de mayor representación fue China (n = 10, 71,4%), seguido de Suiza (n = 3, 21,4%), mientras que Estados Unidos tuvo menor representación (n = 1, 7,1%). En cuanto a los años de publicación, el de mayor frecuencia fue 2023 (n = 4, 28,6%), seguido de 2024 (n = 3, 21,4%), 2020 (n = 3, 21,4%), 2018 (n = 2, 14,3%), 2019 (n = 1, 7,1%) y 2016 (n = 1, 7,1%). Fueron recopilados un total de 10 sistemas diferentes de intubación asistidos por robot.
-
Sistemas de intubación orotraqueal
-
Remote robot-assisted intubation system (RRAIS)
Este sistema se diseñó con cuatro componentes principales: un robot de intubación, un sistema de control, una computadora portátil y un joystick (Figura 2)[12]. Un estudio comparó dos dispositivos de intubación, uno utilizando el laringoscopio tradicional y otro mediante un sistema robótico en porcinos. Los resultados mostraron que la tasa de éxito en el primer intento para el grupo robótico fue del 80% (p = 0,17) y la tasa de éxito total alcanzó el 90% (p = 0,30), con una complicación de intubación del 10% (p > 0,99). Además, el tiempo de
intubación en el grupo robótico fue de 73,8 segundos en el primer intento, con un promedio de 74,6 ± 2,3 segundos (p < 0,01). No obstante, cuatro fallos en el grupo de laringoscopio se debieron a intentos excesivos o tiempos prolongados, y un fallo en el grupo robótico fue causado por bradicardia durante la exposición de la glotis, no hubo diferencias estadísticamente significativas en la elevación de la frecuencia cardíaca y presión arterial sistólica (p = 0,33 y p = 0,89), aunque los valores fueron ligeramente mayores con el laringoscopio[8].
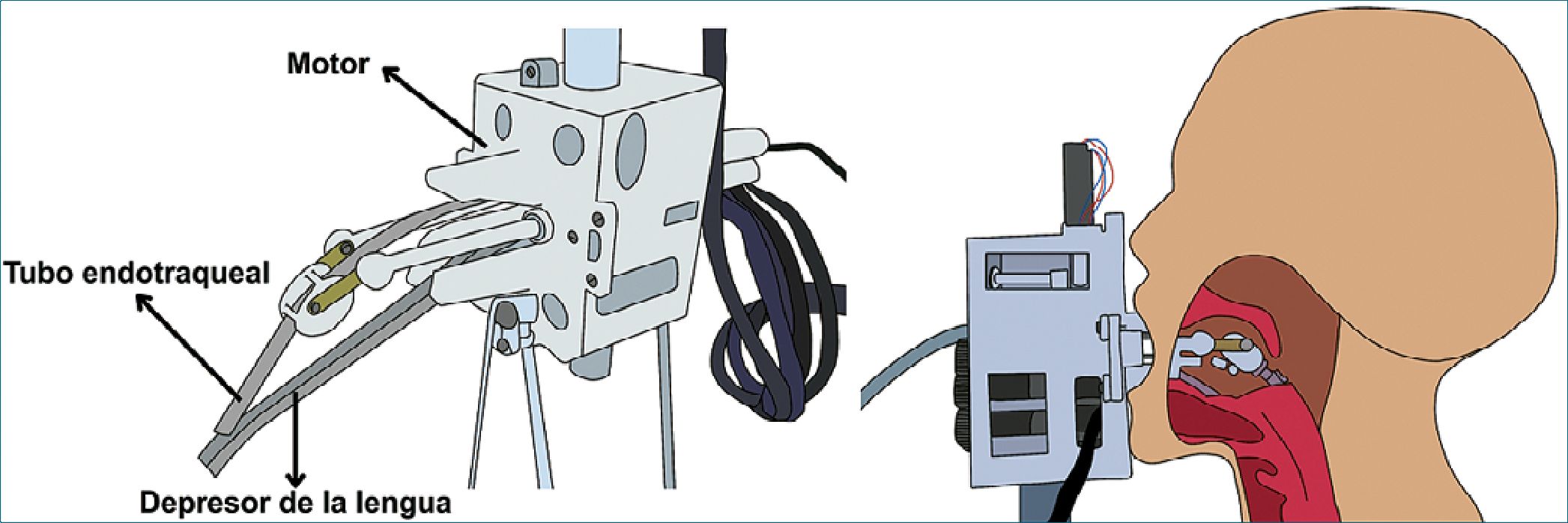
Figura 2. Componentes del sistema.
-
Robotic endoscope-eutomated vía laryngeal imaging for tracheal intubation (REALITI)
Este dispositivo combinó un modo de control manual con un modo automático para dirigir el tubo hacia la tráquea (Figura 3)[13]. En un primer estudio, se incluyeron a 14 participantes (7 médicos y 7 no médicos) realizando 163 ensayos, obteniendo una tasa de éxito que alcanzó el 99%, sin falsos positivos en la detección de características anatómicas. En cuanto al tiempo de intubación, la mediana en modo automático fue de 15 segundos en el grupo médico y de 15,9 segundos en el grupo no médico, con una diferencia significativa (p = 0,008)[5]. En un segundo estudio, no se presentaron falsos positivos en la detección de características anatómicas, con inserciones traqueales exitosas en ambos modos (manual y automático) y el tiempo de orientación automática hacia la glotis fue de 3 segundos, con un tiempo total de manipulación por debajo de los 30 segundos. En cuanto al tiempo de intubación en el modo manual, la mediana de intubación en el grupo medico fue de 17 segundos (p = 0,65) y del grupo no médico de 18,1 segundos[6].
-
Robot-assisted tracheal intubation system based on a soft actuator (RATIS)
El sistema incluyó un tubo traqueal flexible, un actuador
Tabla 2. Estrategia de búsqueda
| Bases de datos | Combinación de términos | Filtros aplicados |
| PubMed | (((((Robot-assisted) AND (Tracheal intubation)) OR (Robotic endoscope)) OR (Robotic intubation)) OR (Automated intubation)) AND (Airway management) | Idioma: Inglés/Español; Fechas: 2014-2024 |
| Scopus | (robot-assisted) OR(Robotic endoscope)OR(Robotic intubation) AND(Tracheal intubation)OR(Automated intubation)AND(Airway management) | Idioma: Inglés/Español; Fechas: 2014-2024 |
| BIREME | (((((robot-assisted) AND (tracheal intubation)) OR (robotic endoscope)) OR (robotic intubation)) OR (automated intubation)) AND (airway management) | Idioma: Inglés/Español; Fechas: 2014-2024 |
Tabla 3. Categorías tecnológicas
| Categoría tecnológica | Sistemas |
| Actuadores flexibles/neumáticos | RATIS [3], PATIS [16], RAFNI [19] |
| Navegación autónoma/ algoritmos AI | REALITI [5,6,13], AIRS [7], IntuBot [2] |
| Teleoperación para emergencias | RRAIS [8, 12], RNIS [17,18] |
| Máscara laríngea/mecánica asistida | RSEI [14] |
| Control robótico maestro-esclavo | EIR [15], RNIS [17,18] |
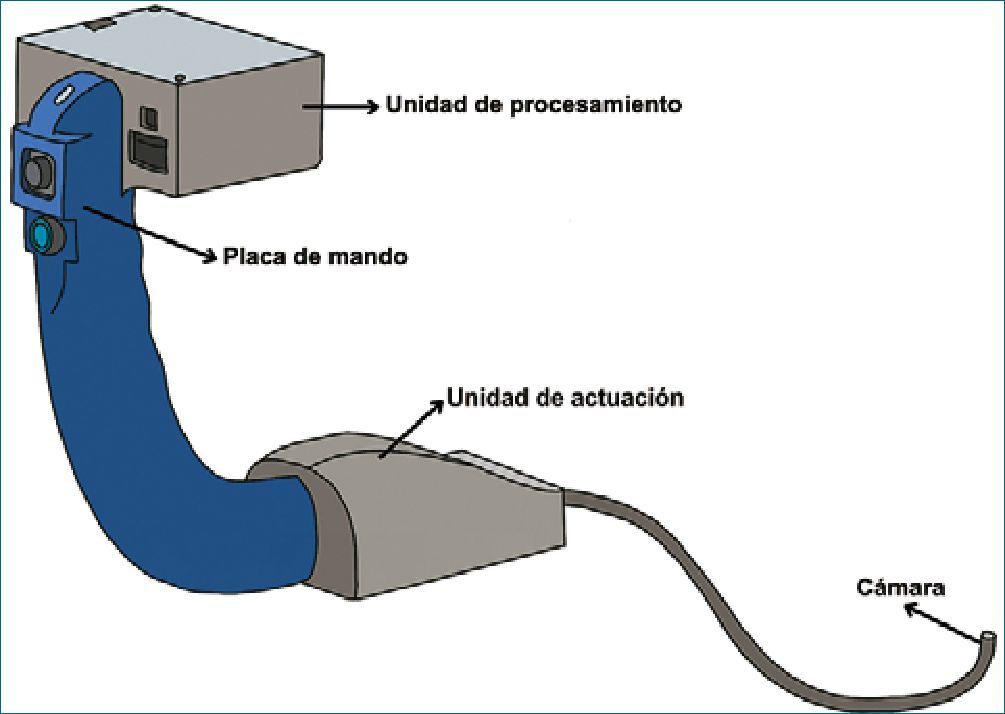
Figura 3. Dispositivo con su control manual con modo automático para dirigir hacia la tráquea.
blando con dos grados de libertad, un endoscopio integrado para detección automática de características anatómicas y un sistema de accionamiento hidráulico (Figura 4). En este estudio, se realizaron 10 ensayos, y se observó una precisión del 96,67% en el reconocimiento de la anatomía y una tasa de éxito del 100% en la inserción del tubo. El tiempo promedio de intubación fue de 45,6 segundos[3].
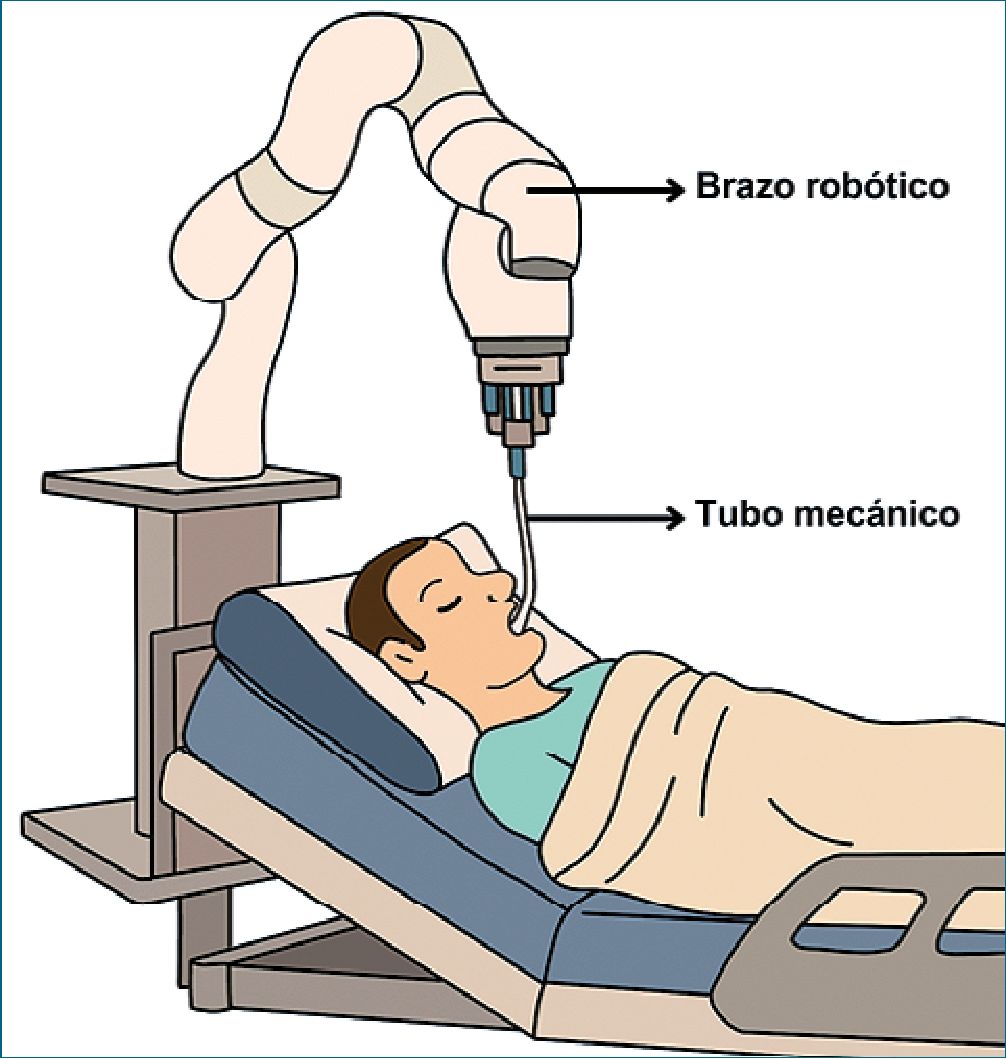
Figura 4. Características del sistema.
-
Autonomous intubation robot system (AIRS)
Este dispositivo, utilizó un sistema de control visual e híbrido, con autoconducción mediante dos brazos robóticos, laringoscopio multifuncional, sensores de fuerza y cámaras; adicionalmente contó con un botón de emergencia para detener operaciones y retirar el robot en situaciones críticas (Figura 5). Fue diseñado con un sistema de navegación autónoma y fue estudiado en solo ensayo realizado por personal médico, incluidos doctores de la UCI. Este dispositivo mostró una precisión mecánica de 0,04 N y una precisión del brazo robótico de 0,03 mm, sin embargo, el tiempo de intubación fue relativamente largo, alcanzando los 120 segundos[7].
-
Robotic system for endotracheal intubation based on laryngeal mask (RSEI)
Este sistema, utilizó una máscara laríngea conectada al robot, que deprimió la lengua y abrió la glotis para posicionar el catéter cerca de esta. El catéter se insertó en el tracto respiratorio y se conectó al ventilador para suministrar oxígeno. La máscara laríngea se creó con material de goma suave, facilitando el proceso de intubación (Figura 6). El sistema fue probado en 20 ensayos realizados por personal médico y de ingeniería robótica. La tasa de éxito fue del 95%, con 19 de 20 intentos exitosos. El tiempo promedio de intubación fue de 66,2 segundos, con un rango que variaba entre 37 segundos y 92 segundos, lo que indicó un rendimiento consistente, aunque con variabilidad en la rapidez de la intubación[14].
-
Sistema IntuBot
Se presentó un prototipo robótico diseñado para automatizar este procedimiento, con un sistema de hardware que dirige un estilete en movimientos rectilíneos con corrección de trayectoria y dos servomotores generando flexión en su punta para navegar a través de la vía aérea del paciente (Figura 7). También se presentó un algoritmo de navegación basado en visión en tiempo real para guiar el procedimiento y localizar las cuerdas vocales, que fueron el objetivo final del tubo. El sistema mostró una precisión en el algoritmo de detección del 91,77%, que ajustando el umbral de fusión dentro de un rango óptimo de 56 a 77, se logró una precisión que varió entre el 91,3% y el 92,9%[2].
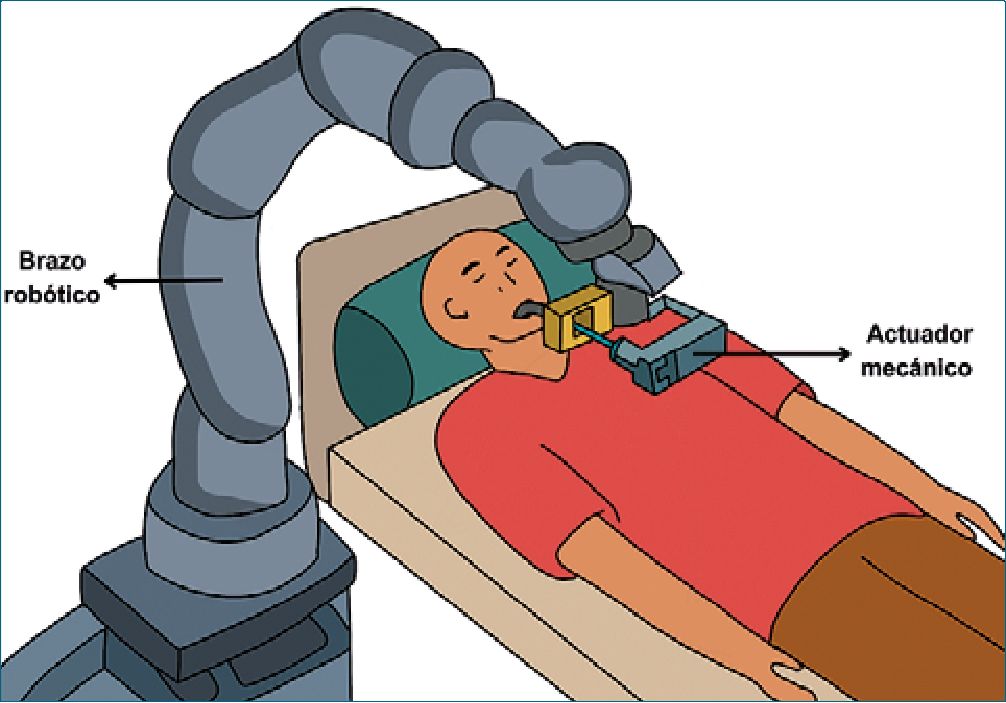
Figura 6. Uso de máscara laríngea de material suave.
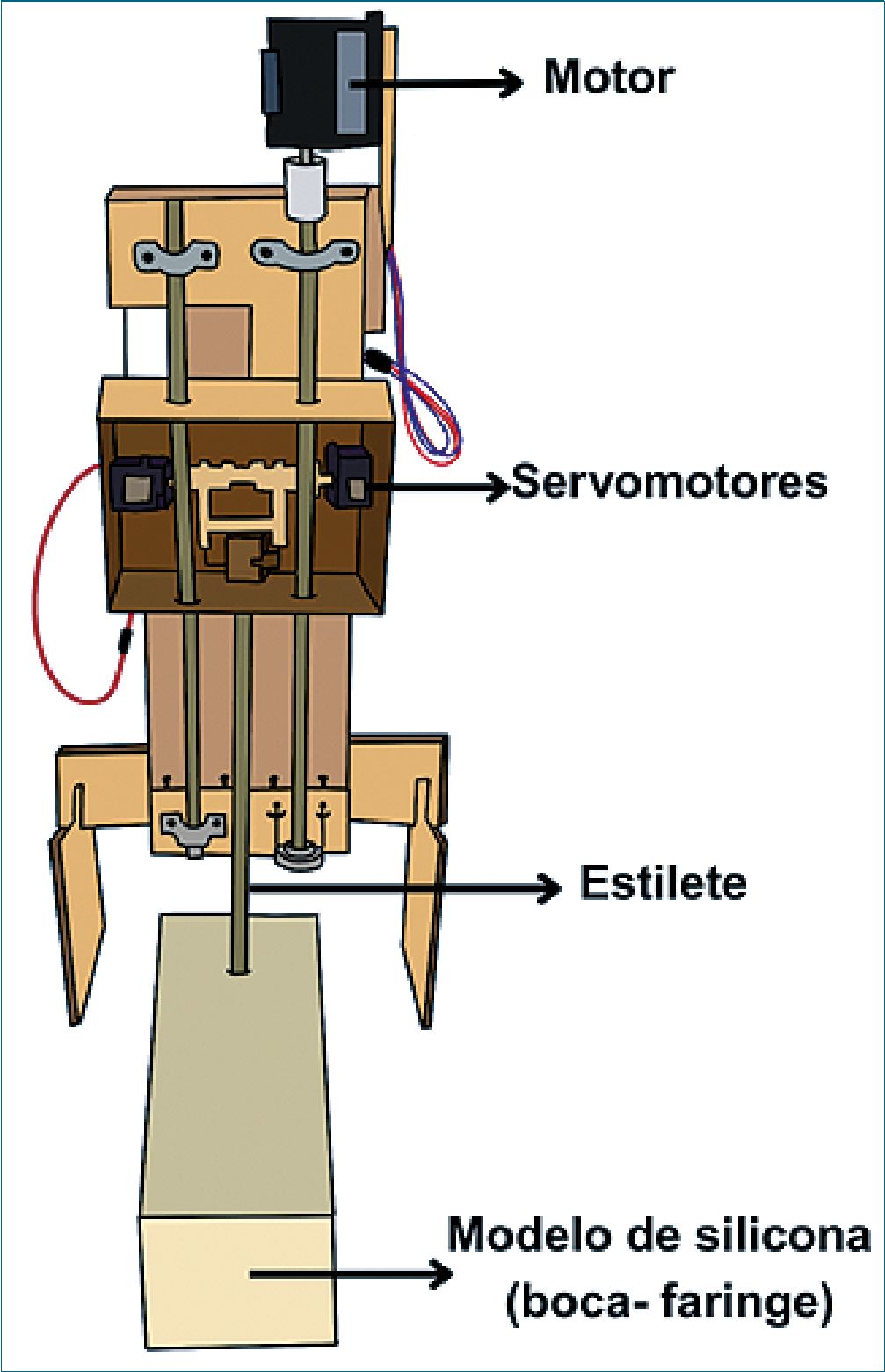
Figura 7. Dos sevomotores que generan flexión.
-
Endotracheal intubation robot (EIR)
Se diseñó un dispositivo para intubaciones traqueales guiadas por endoscopia en telecirugía controlado por un sistema maestro-esclavo (Figura 8). Se construyó un prototipo para experimentos, y los resultados de simulación y experimentación verificaron la validez del diseño del robot, el modelado cinemático y los métodos de control. El robot de intubación fue capaz de navegar eficazmente a través de un modelo anatómico del árbol bronquial en un maniquí de entrenamiento, sin embargo, no se reportaron datos específicos sobre la precisión o el tiempo de intubación[15].
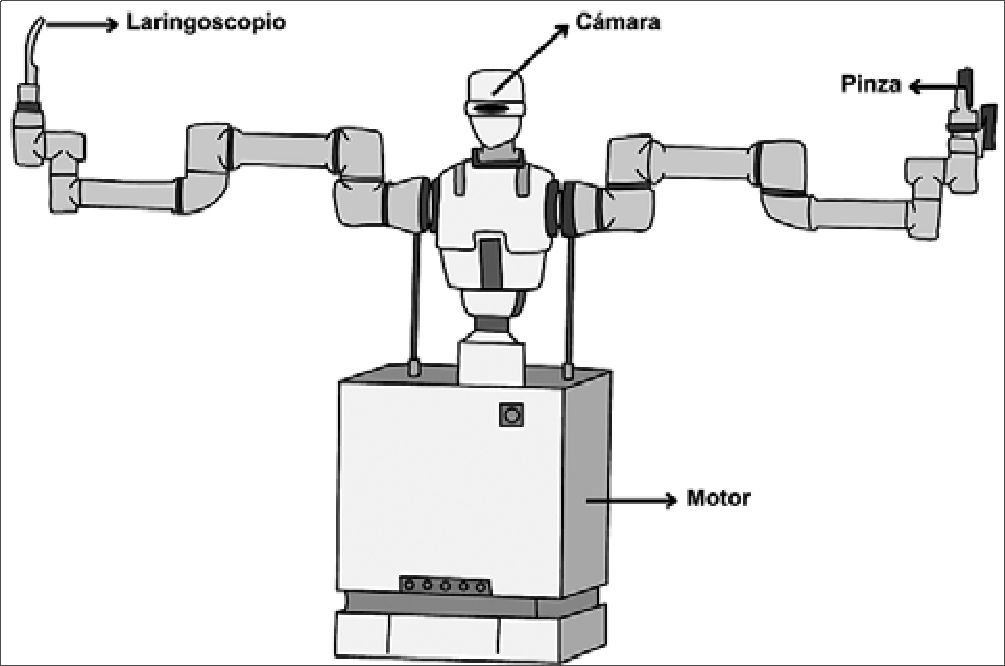
Figura 5. Sistema de control visual e híbrido.
-
Pneumatic actuator-based tracheal intubation system (PATIS)
Este sistema, utilizó un actuador neumático con depresor lingual, mecanismo de avance y dirección (Figura 9). Adicionalmente, se garantizó control remoto por expertos médicos, permitiendo intubaciones exitosas cumpliendo con los requisitos necesarios para la cirugía de intubación en escenarios de emergencia. El depresor de la lengua junto a los mecanismos de dirección y alimentación lograron las acciones necesarias, con desplazamientos y fuerzas para insertar el catéter en la tráquea (15-16 cm) con la glotis expuesta[16]. No se proporcionaron detalles adicionales sobre las métricas de precisión o el tiempo de intubación.
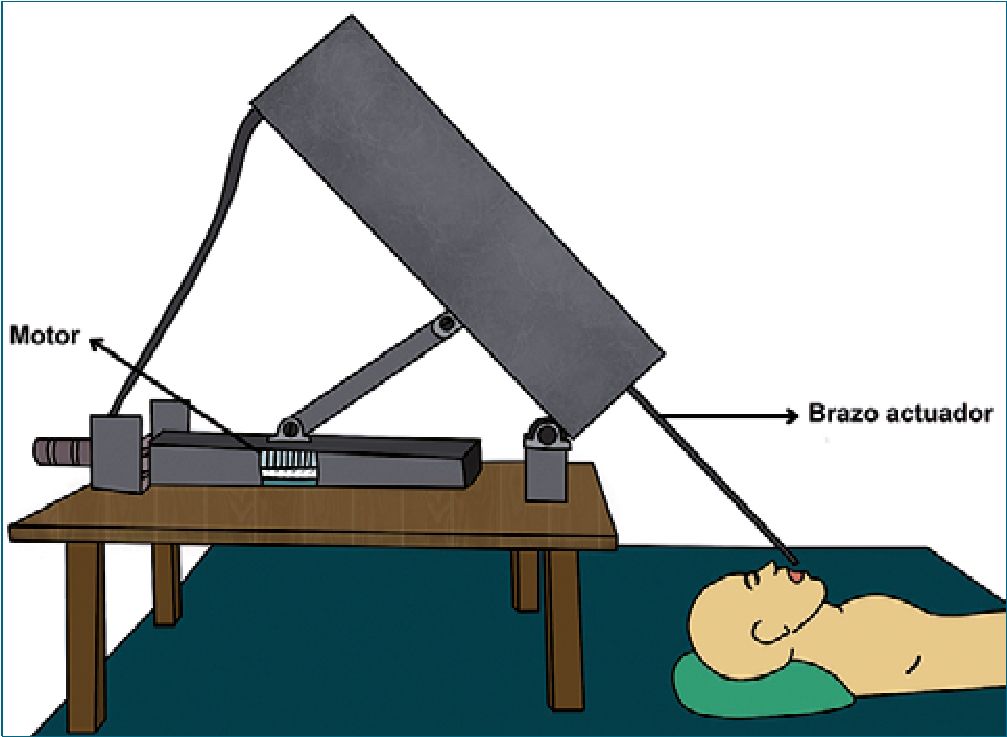
Figura 8. Sistema de control maestro-esclavo.
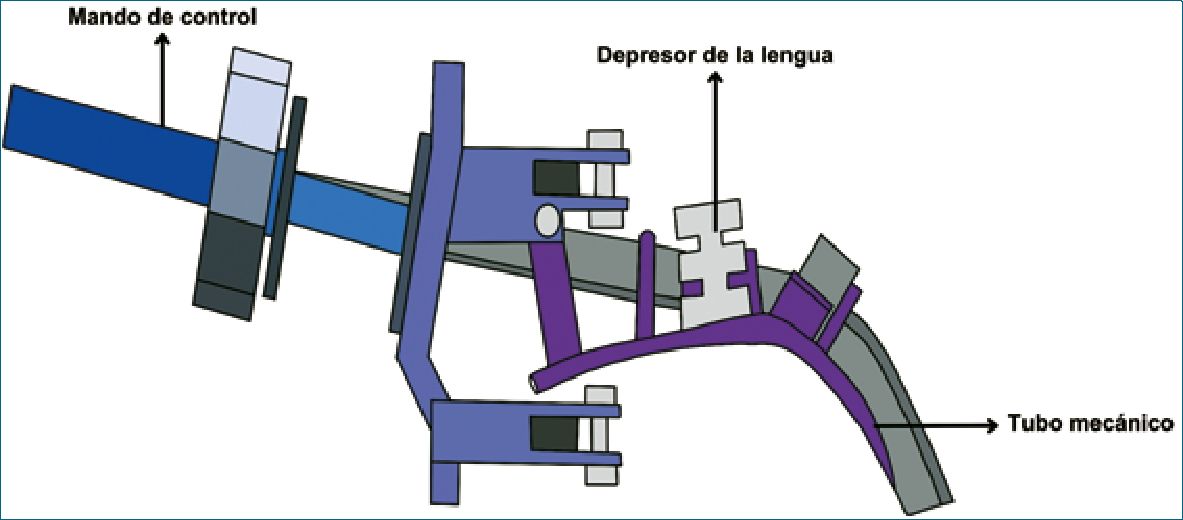
Figura 9. Sistema del tubo mecánico y depresor de lengua.
Sistemas de intubación nasotraqueal
-
Robotic nasotracheal intubation system (RNIS)
Se desarrolló un sistema robótico maestro-esclavo para intubación nasotraqueal, con detección automática del centro del lumen traqueal en imágenes endoscópicas mediante lógica difusa[17],[18]. Además, permitió teleoperación asistida por joystick y retroalimentación visual para ajustar la orientación de la punta del endoscopio (Figura 10). En un primer estudio[17], 18 ensayos fueron realizados por anestesiólogos expertos y estudiantes de medicina. Se observó que el grupo con el sistema robótico tuvo una menor cantidad de colisiones (n = 0,83), en comparación con los estudiantes (n = 5,3) y los anestesiólogos expertos sin robot (n = 2,7). El tiempo de intubación promedio fue más largo en el grupo con el sistema robótico (173,5 segundos) en comparación con los otros grupos (115,7 y 91,2 segundos, respectivamente). En un segundo estudio[18], los anestesiólogos expertos utilizaron tres modos diferentes de intubación: manual, teleoperación no asistida y teleoperación asistida. El número de colisiones fue menor en el modo asistido (n = 5) en comparación con el modo no asistido (n = 7) y el manual (n = 12). El tiempo de intubación fue más largo en el modo no asistido (130 segundos), mientras que el modo asistido mostró un tiempo intermedio de 70 segundos, con un tiempo adicional de 15 segundos para pasar la glotis[18].
-
Robotic-assisted flexible nasotracheal Intubation system (RAFNI)
Este sistema, desarrolló un robot flexible y portátil para intubación nasotraqueal con un catéter continuo que controla la forma del tubo endotraqueal y facilita su paso hacia la tráquea (Figura 11). Integró un endoscopio para observación en tiempo real y ajustes en el tratamiento. Su diseño de desmontaje rápido permitió procedimientos asépticos y de bajo costo. Este dispositivo fue probado con 1 médico profesional y 3 operadores no entrenados que posteriormente fueron capacitados[19]. Después de este entrenamiento, los operadores lograron realizar con éxito la intubación orotraqueal y la precisión en la posición distal del catéter fue de 1.593 mm, demostrando buen desempeño tras una capacitación adecuada.
-
Patrones y tendencias comunes en los sistemas revisados
Se halló una recurrencia en algunos sistemas, como lo son; un predominio de actuadores robóticos avanzados (n = 3, 30%) y el enfoque en navegación autónoma (n = 3, 30%). Así, en menor medida su uso en emergencia prehospitalaria o áreas remotas (n = 2, 20%) y sistemas robóticos maestro-esclavo (n = 2, 20%), y como única tecnología, un sistema de intubación mecánica asistida con máscara laríngea (n = 1, 10%) (Tabla 3).
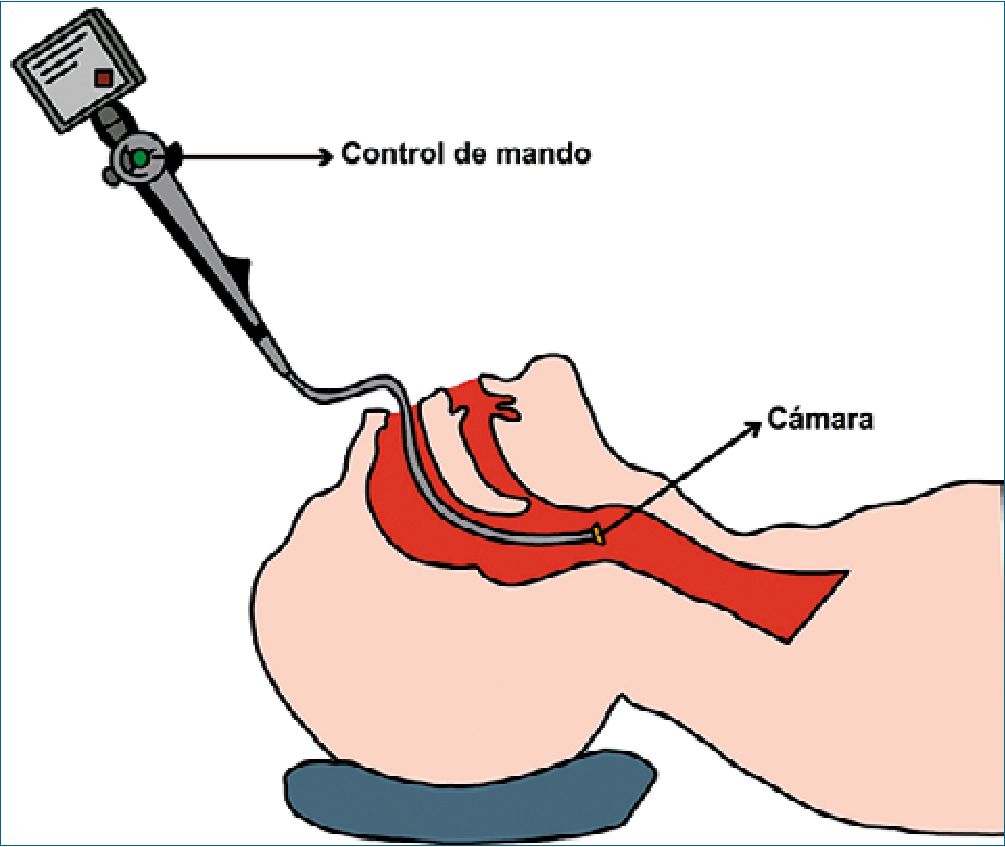
Figura 10. Sistema de retroalimentación visual para ajustar la punta del endoscopio.
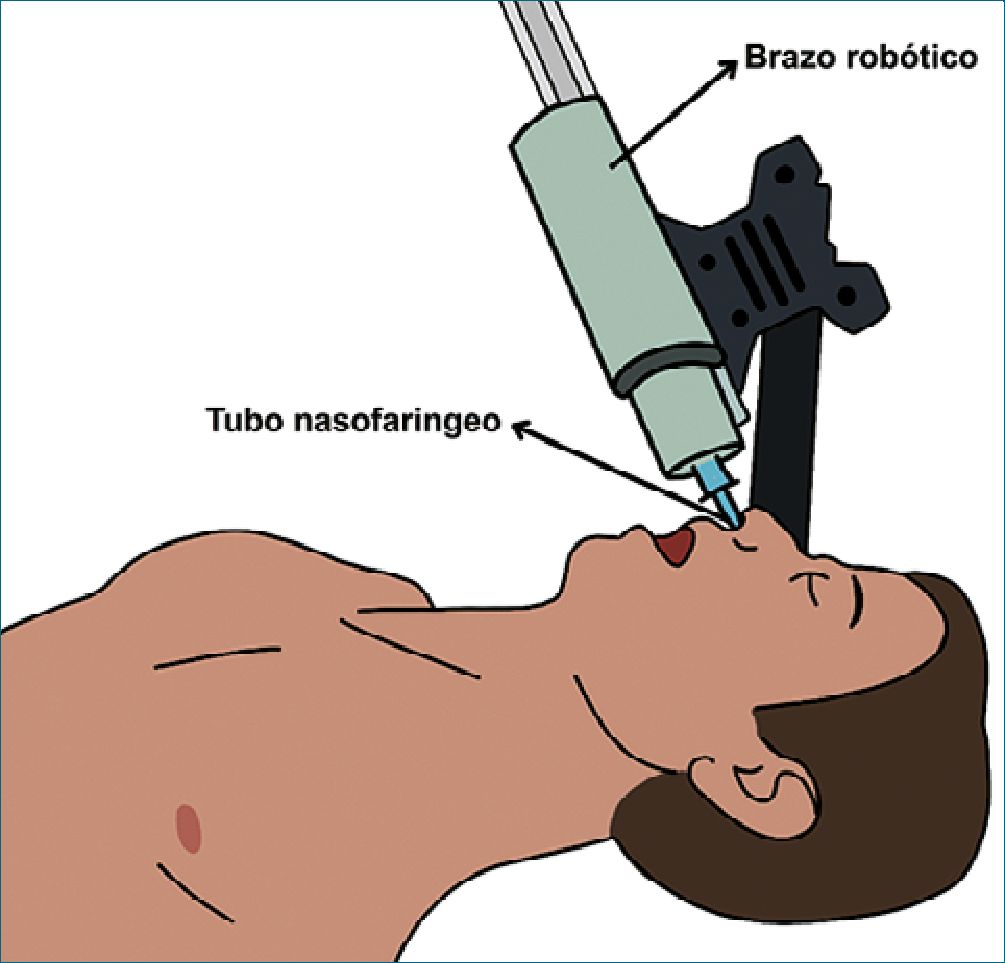
Figura 11. Instalación de tubo nasofaringeo.
-
Comparación de los sistemas robóticos con tecnologías convencionales
Las tecnologías robóticas estudiadas destacan por su alta precisión, menor tiempo de intubación y mejor visualización de la anatomía en comparación con las técnicas convencionales. Un estudio realizado por Trent et al.[2], señala que los videolaringoscopios, una tecnología convencional, tienen una tasa de éxito del 90%, superior a la de la laringoscopía directa, que alcanza el 79%. Además, los estudios enfatizan la importancia de la experiencia de los profesionales de la salud para minimizar el número de intentos y optimizar la eficacia del procedimiento. Estos hallazgos resaltan el impacto de las tecnologías avanzadas en la intubación, evidenciando que, si bien las herramientas robóticas ofrecen mayor eficiencia, siguen siendo estudios experimentales, por lo que la experiencia del profesional sigue siendo un factor determinante para el éxito del procedimiento por lo que se debe reforzar el conocimiento teórico práctico del personal de salud.
-
Aplicaciones y avances tecnológicos en sistemas de intubación asistida por robot
La evolución del conocimiento médico y los avances tecnológicos han impulsado el desarrollo de técnicas y dispositivos innovadores para el manejo de la vía aérea[20],[21]. Se han explorado soluciones que incluyen el uso de actuadores suaves y flexibles que, al estar controlados mediante sistemas hidráulicos y electrónicos, se adaptan a la anatomía del paciente, reduciendo el riesgo de lesiones en las vías respiratorias y garantizando una inserción precisa[3],[19]. Sumado a esto, algunos
dispositivos avanzados incorporan endoscopios removibles y tecnología de posicionamiento autónomo, siendo capaces de identificar puntos anatómicos claves, como la glotis. Asimismo, algunos sistemas ya emplean algoritmos de inteligencia artificial y aprendizaje automático, lo cual ayuda a predecir casos de vía aérea difícil, optimizando la seguridad del procedimiento y disminuyendo la necesidad de intervención directa del opera- dor[2],[5],[7].
Por otro lado, los avances en telecomunicaciones y sistemas de control remoto se han incorporado a este campo, permitiendo realizar intubaciones a distancia. Dispositivos como RRAIS facilitan intervenciones médicas en áreas remotas o de difícil acceso, superando barreras geográficas y resultando especialmente útiles en escenarios críticos[8],[12]. Además, herramientas como IntuBot y AIRS, eliminan la necesidad de intervención manual directa, demostrando poseer la capacidad de seleccionar y ejecutar de manera autónoma el procedimiento[2],[7]. Sin embargo, hasta ahora solo ha demostrado su eficacia en simulaciones y modelos experimentales. Por lo tanto, se requieren más estudios en sujetos humanos para validar su seguridad y proporcionar datos sólidos que respalden su uso clínico.
Otra innovación en estos sistemas es la integración de sensores y retroalimentación en tiempo real. Algunos equipos han incorporado sensores de fuerza y cámaras, lo que permite un monitoreo continuo y retroalimentación durante el procedimiento, proporcionando datos más precisos y facilitando ajustes inmediatos por parte del operador. Por ejemplo, dispositivos como REALITI cuentan con cámaras en sus puntas para una visualización interna detallada, lo cual podría mejorar la seguridad y efectividad del procedimiento en entornos clínicos[5],[6],[13]. Además, el diseño ergonómico y multifuncional también ha evolucionado, modelos como el AIRS y RNIS, ahora incorporan brazos robóticos avanzados y laringoscopios multi- funcionales que combinan flexibilidad y precisión, ofreciendo movimientos suaves y controlados[7],[17].
La pandemia de COVID-19 resaltó la vulnerabilidad del operador ante el contagio durante procedimientos que generan aerosoles, como en el manejo de la vía aérea, lo que impulsó la búsqueda de robots automatizados o controlados a distancia para realizar estas tareas de alto riesgo[7],[12],[23]. Los robots de intubación se presentan como una solución prometedora debido a sus capacidades de movimiento preciso, navegación exacta y facilidad de acceso en intubación difícil de la vía aérea, todo con la ventaja de realizar el procedimiento de forma remota, protegiendo a los profesionales de la salud y maximizando la tasa de éxito[8].
A pesar de que algunos estudios enfrentan limitaciones, como el tiempo de intubación en el caso del AIRS, otros sistemas como REALITI y RATIS cuentan con avances en automatización y utilización de materiales flexibles como actuadores blandos, respectivamente[3],[5],[7]. Las aplicaciones clínicas de los sistemas robóticos se ilustran en la Figura 12.
-
Consideraciones de seguridad y aspectos éticos
Además de los aspectos técnicos, la implementación de esta tecnología plantea importantes desafíos éticos[25]. En términos de seguridad, los sistemas robóticos parecen ser comparables a los métodos tradicionales. Por ejemplo, el RRAIS y el laringoscopio convencional presentaron tasas similares de complicaciones (10% y dos eventos, respectivamente), mientras que sistemas como el REALITI reportaron procedimientos exitosos sin complicaciones observadas[5],[8]. Además, el diseño de características de seguridad, como los botones de emergencia del AIRS y las estructuras flexibles de sistemas como el RAFNI, contribuyen a garantizar la seguridad del paciente durante el procedimiento[7],[19].
Aunque la calidad de la atención de los pacientes ha sido superior con los avances en tecnología médica, su aceptación en su uso ha sido limitada[28]. Por lo que los costos y la regulación son un reto para adoptar estrategias para la estandarización y validación de los modelos robóticos.
En los Estados Unidos, la Administración de Alimentos y Medicamentos (FDA), evalúa y autoriza los dispositivos médicos asistidos por robots mediante el proceso 510(k), que permite aprobar tecnologías basadas en equivalencia de dispositivos previamente autorizados por esta entidad, facilitando su introducción al mercado[26]. Sin embargo, con el avance de la autonomía robótica, se prevé que, para el futuro, algunos robots médicos podrían clasificarse como dispositivos de alto riesgo, lo que implicaría cumplir con protocolos estrictos en el proceso de aprobación previa a su comercialización[27],[28]. En el mismo sentido, exige la creación de un marco regulatorio que implicaría la asignación de responsabilidades, fabricación y contratación de personal especializado para supervisar estos sistemas complejos.
-
Limitaciones
Las limitaciones incluyeron el tamaño reducido de los estudios disponibles, la falta de ensayos clínicos controlados y la heterogeneidad en el diseño y evaluación de los dispositivos. Estas barreras dificultan la generalización de los resultados y resaltan la necesidad de estudios más robustos y estandarizados para demostrar su seguridad y efectividad en la práctica clínica.
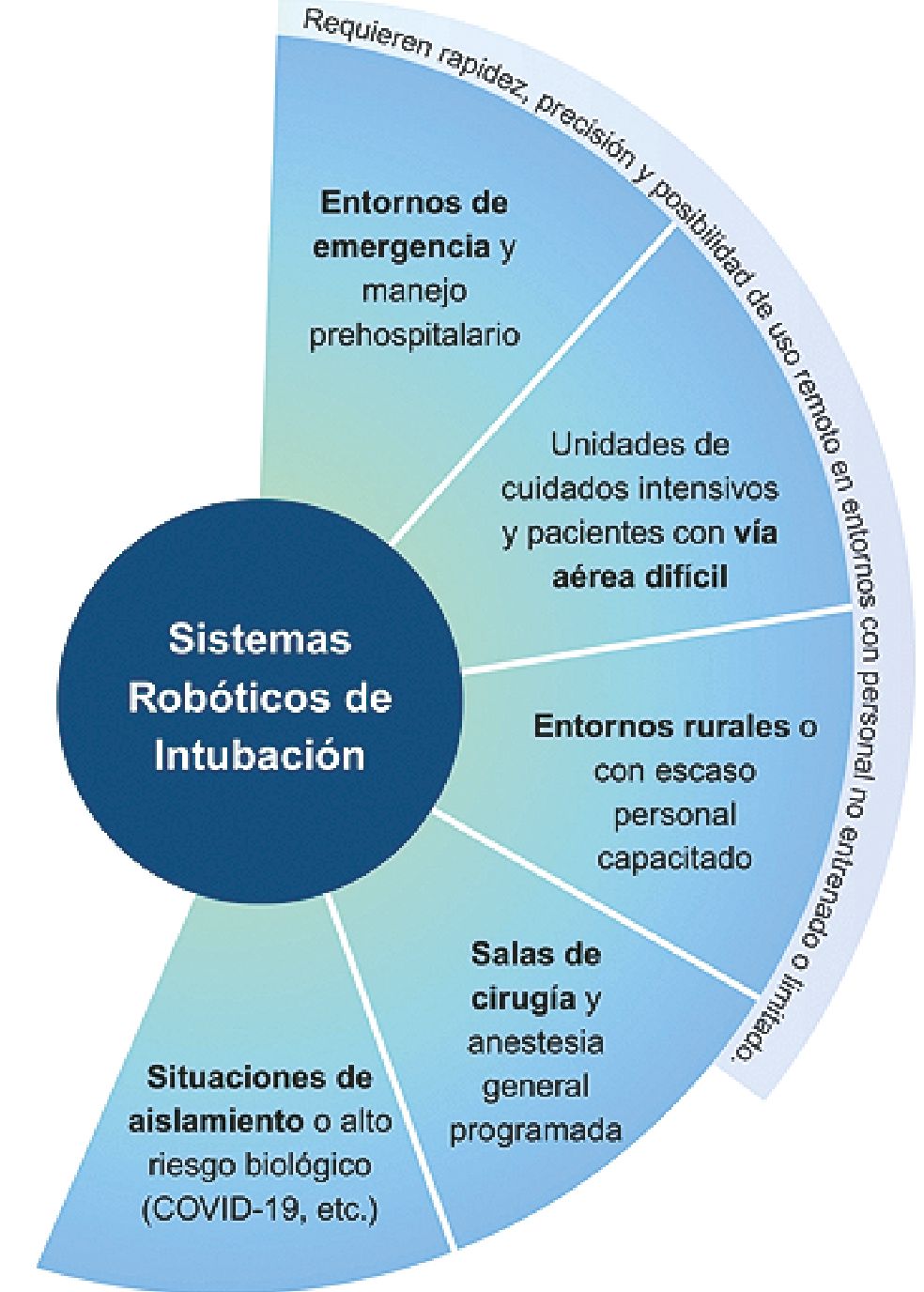
Figura 12. Sistemas robóticos de intubación.
-
Conclusión
Se destaca el potencial de estos dispositivos para mejorar la seguridad y eficiencia en el manejo avanzado de la vía aérea, especialmente en casos complejos. Este enfoque promete revolucionar la atención prehospitalaria, redefiniendo el estándar del manejo de la vía aérea avanzada tanto en espacios controlados como en entornos desafiantes. Aunque los sistemas robóticos ofrecen ventajas significativas como precisión mejorada y la detección confiable de estructuras anatómicas, persisten desafíos relacionados con la implementación clínica y la optimización de los tiempos en comparación con los métodos convencionales, por lo que se requiere más investigación para evaluar su aplicabilidad generalizada y confirmar su impacto en los resultados clínicos.
Contribución de los autores
GRR: Conceptualización, planeación del artículo original, investigación, redacción y borrador original.
AMV: Investigación, redacción y borrador original.
DST: Metodología, redacción y borrador original.
MJS: Metodología, análisis formal, redacción y borrador original.
MGA: Redacción y borrador original y administración del proyecto.
EHH: Supervisión, análisis formal, redacción y borrador original.
Financiación: Investigación derivada del proyecto MED-341-2023 del grupo de investigación Medicina Familiar y Salud de la Población, Universidad de La Sabana, Colombia.
Conflicto de intereses: Ninguno.
-
Referencias
1. Rodríguez JJ, Melo-Ceballos PA, Enríquez-Rodríguez DA, Arteaga-Velásquez J, García-García E, Higuita-Gutiérrez LF. Complications of airway management: systematic literature review. Arch Med (Oviedo). 2018;14(4):7. https://doi.org/10.4187/respcare.02884.
2. Singh H, Ghazali A, Myint A, Ryu SI, Sheth S. IntuBot: Design and Prototyping of a Robotic Intubation Device. IEEE International Conference on Robotics and Automation (ICRA); 2018. https://doi.org/10.1109/ICRA.2018.8460779.
3. Liu J, Ma L, Hu C, Kang J, Zhang B, Li R, et al. A robot-assisted tracheal intubation system based on a soft actuator? Int J Comput Assist Radiol Surg. 2024 Aug;19(8):1495–504. https://doi.org/10.1007/s11548-024-03209-9 PMID:38862746
4. Maguire S, Schmitt PR, Sternlicht E, Kofron CM. Endotracheal intubation of difficult airways in emergency settings: a guide for clinical practice. Med Devices (Auckl). Volume 2023:16 Pages 183-199. https://doi.org/10.2147/MDER.S419715.
5. Boehler Q, Gage DS, Hofmann P, Gehring A, Chautems C, Spahn DR. REALITI: a robotic endoscope automated via laryngeal imaging for tracheal intubation. ETH Zurich Research Collection; 2020. https://doi.org/10.3929/ethz-b-000417700.
6. Biro P, Hofmann P, Gage D, Boehler Q, Chautems C, Braun J, et al. Automated tracheal intubation in an airway manikin using a robotic endoscope: a proof of concept study. Anaesthesia. 2020 Jul;75(7):881–6. https://doi.org/10.1111/anae.14945 PMID:31900928
7. Cheng A, Qiu Y, Hao H, Xu Y, Nie Y, Jiang Y, et al. Autonomous Intubation Robot System based on Visual Servoing and Hybrid Control. IEEE TRANSACTIONS ON MEDICAL ROBOTICS AND BIONICS, VOL. 3, NO. 1, JULY 2021. https://doi.org/10.36227/techrxiv.15087696.v1.
8. Wang X, Tao Y, Tao X, Chen J, Jin Y, Shan Z, et al. An original design of remote robot-assisted intubation system. Sci Rep. 2018 Sep;8(1):13403. https://doi.org/10.1038/s41598-018-31607-y PMID:30194353
9. Tricco AC, Lillie E, Zarin W, O’Brien KK, Colquhoun H, Levac D, et al. PRISMA extension for scoping reviews (PRISMA-ScR): checklist and explanation. Ann Intern Med. 2018 Oct;169(7):467–73. https://doi.org/10.7326/M18-0850 PMID:30178033
10. Arksey H, O’Malley L. Scoping studies: towards a methodological framework. Int J Soc Res Methodol. 2005;8(1):19–32. https://doi.org/10.1080/1364557032000119616.
11. Levac D, Colquhoun H, O’Brien KK. Scoping studies: advancing the methodology. Implement Sci. 2010 Sep;5(1):69. https://doi.org/10.1186/1748-5908-5-69 PMID:20854677
12. Tao Y, Pan T, Cao Q. Prototype Design of a Teleoperation Robot for Endotracheal Intubation, Daejeon, Korea: 12th Asian Conference on Computer Aided Surgery; 2016, p. 136.
13. Boehler Q, Hofmann P, Gage D, Gehring A, Chautems C, Biro P, et al. Development of a Robotic Endoscope Automated via Laryngeal Imaging for Tracheal Intubation (REALITI). ETH Zürich 2019. https://doi.org/10.3929/ethz-b-000393102.
14. Qin Y, Hu D, Huang J, Cao Q. Surgical Robotic System for Endotracheal Intubation Based on Laryngeal Mask. Proceedings – 2023 2nd International Symposium on Control Engineering and Robotics, ISCER 2023, Institute of Electrical and Electronics Engineers Inc.; 2023, p. 32–6. https://doi.org/10.1109/ISCER58777.2023.00012.
15. Qi Q, Lv J, Sun K, Sun Y, Jiang A, Ji A. Design and Motion Control of Master-Slave Control Endotracheal Intubation Robot. Int J Med Robot. 2024 Aug;20(4):e2669. https://doi.org/10.1002/rcs.2669 PMID:39183583
16. Liang Z, Miao H, Guo Z, Zhu X, Wang X, Cao Q, et al. Pneumatic actuator based tracheal intubation system. Proceedings – 2020 3rd World Conference on Mechanical Engineering and Intelligent Manufacturing, WCMEIM 2020, Institute of Electrical and Electronics Engineers Inc.; 2020, p. 810–4. https://doi.org/10.1109/WCMEIM52463.2020.00173.
17. Deng Z, Guo Y, Zhang S, Jiang H, Zheng X, He B. Development and image-guided control of a robotic endoscope system for nasotracheal intubation. Mechatronics. 2023;96:103059. https://doi.org/10.1016/j.mechatronics.2023.103059.
18. Deng Z, Zhang S, Guo Y, Jiang H, Zheng X, He B. Assisted teleoperation control of robotic endoscope with visual feedback for nasotracheal intubation. Robot Auton Syst. 2024;172:104586. https://doi.org/10.1016/j.robot.2023.104586.
19. Liu H, Liu SQ, Xie XL, Li Y, Zhou XH, Feng ZQ, et al. An Original Design of Robotic-Assisted Flexible Nasotracheal Intubation System. 2023 IEEE International Conference on Robotics and Biomimetics, ROBIO 2023, Institute of Electrical and Electronics Engineers Inc.; 2023. https://doi.org/10.1109/ROBIO58561.2023.10354806.
20. Trent SA, Kaji AH, Carlson JN, McCormick T, Haukoos JS, Brown CA 3rd; National Emergency Airway Registry Investigators. Video Laryngoscopy Is Associated With First-Pass Success in Emergency Department Intubations for Trauma Patients: A Propensity Score Matched Analysis of the National Emergency Airway Registry. Ann Emerg Med. 2021 Dec;78(6):708–19. https://doi.org/10.1016/j.annemergmed.2021.07.115 PMID:34417072
21. Vasconcelos Pereira A, Simões AV, Rego L, Pereira JG. New technologies in airway management: A review. Medicine (Baltimore). 2022 Dec;101(48):e32084. https://doi.org/10.1097/MD.0000000000032084 PMID:36482552
22. Zaouter C, Joosten A, Rinehart J, Struys MM, Hemmerling TM. Autonomous systems in anesthesia: where do we stand in 2020? A narrative review [Internet]. Anesth Analg. 2020 May;130(5):1120–32. https://doi.org/10.1213/ANE.0000000000004646 PMID:32287120
23. Zemmar A, Lozano AM, Nelson BJ. The rise of robots in surgical environments during COVID-19. Nat Mach Intell. 2020;2(10):566–72. https://doi.org/10.1038/s42256-020-00238-2.
24. Khan MJ, Karmakar A. Emerging Robotic Innovations and Artificial Intelligence in Endotracheal Intubation and Airway Management: Current State of the Art. Cureus. 2023 Jul;15(7):e42625. https://doi.org/10.7759/cureus.42625 PMID:37641747
25. Neupane S, Mitra S, Fernandez IA, Saha S, Mittal S, Chen J, et al. Security Considerations in AI-Robotics: A Survey of Current Methods, Challenges, and Opportunities. IEEE Access. 2024;12:22072–97. https://doi.org/10.1109/ACCESS.2024.3363657.
26. Lee A, Baker TS, Bederson JB, Rapoport BI. Levels of autonomy in FDA-cleared surgical robots: a systematic review. NPJ Digit Med. 2024 Apr;7(1):103. https://doi.org/10.1038/s41746-024-01102-y PMID:38671232
27. Yang GZ, Cambias J, Cleary K, Daimler E, Drake J, Dupont PE, et al. Medical robotics-Regulatory, ethical, and legal considerations for increasing levels of autonomy. Sci Robot. 2017 Mar;2(4):eaam8638. https://doi.org/10.1126/scirobotics.aam8638 PMID:33157870
28. Haidegger T. Autonomy for Surgical Robots: concepts and Paradigms. IEEE Trans Med Robot Bionics. 2019 May;1(2):65–76. https://doi.org/10.1109/TMRB.2019.2913282.


{kind=link}